
Enabling the generalizable grasping for embodied AI
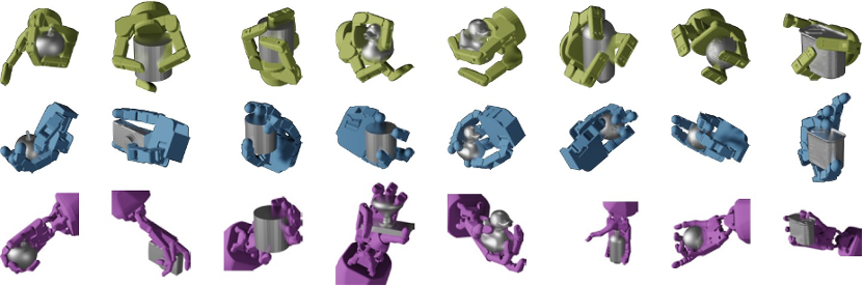
GenDexGrasp is a novel, hand-agnostic grasping algorithm that addresses the challenges of generalizable robotic grasping. Trained on the large-scale MultiDex dataset, it efficiently generates diverse and successful grasps for various multi-fingered robotic hands, outperforming previous methods in success rate, inference speed, and diversity.